机器人对接教程
👁️ 阅读数: 次
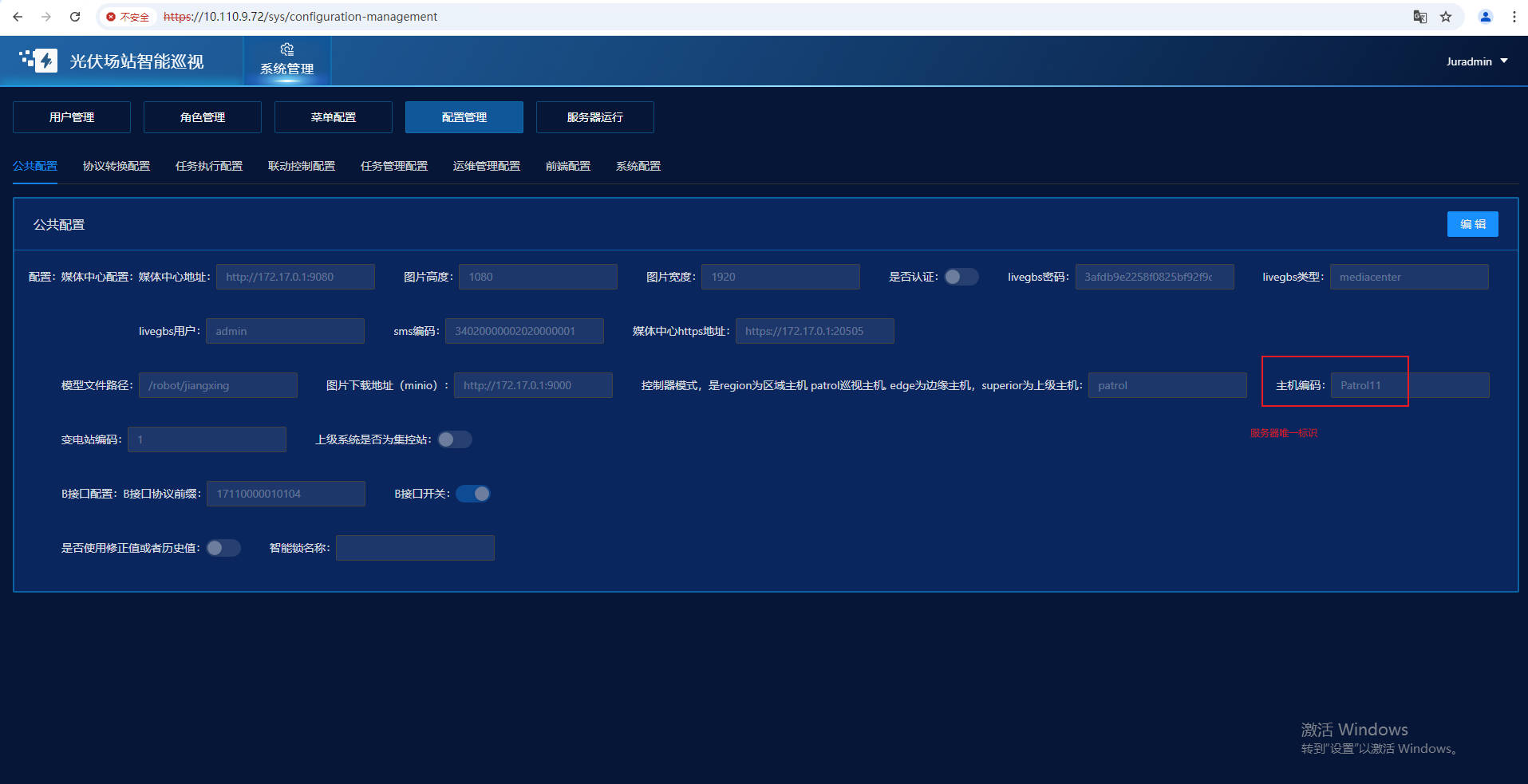
获取服务器信息
服务器唯一标识:Patrol11(登录Juradmin/idea@1234,配置管理--公共配置中,查看主机编码)
ip:服务器ip
端口:10011(一般都是10011)
变电站编码:默认1,可以提前咨询智巡人员
FTP端口:10012
FTP账号:Yzzx220
FTP密码:Yzzx@220901
将以上信息提供给机器人厂家,让机器人厂家注册上来,并找机器人厂家提供机器人的唯一标识(机器人主机编码)、机器人设备编码和机器人的视频流
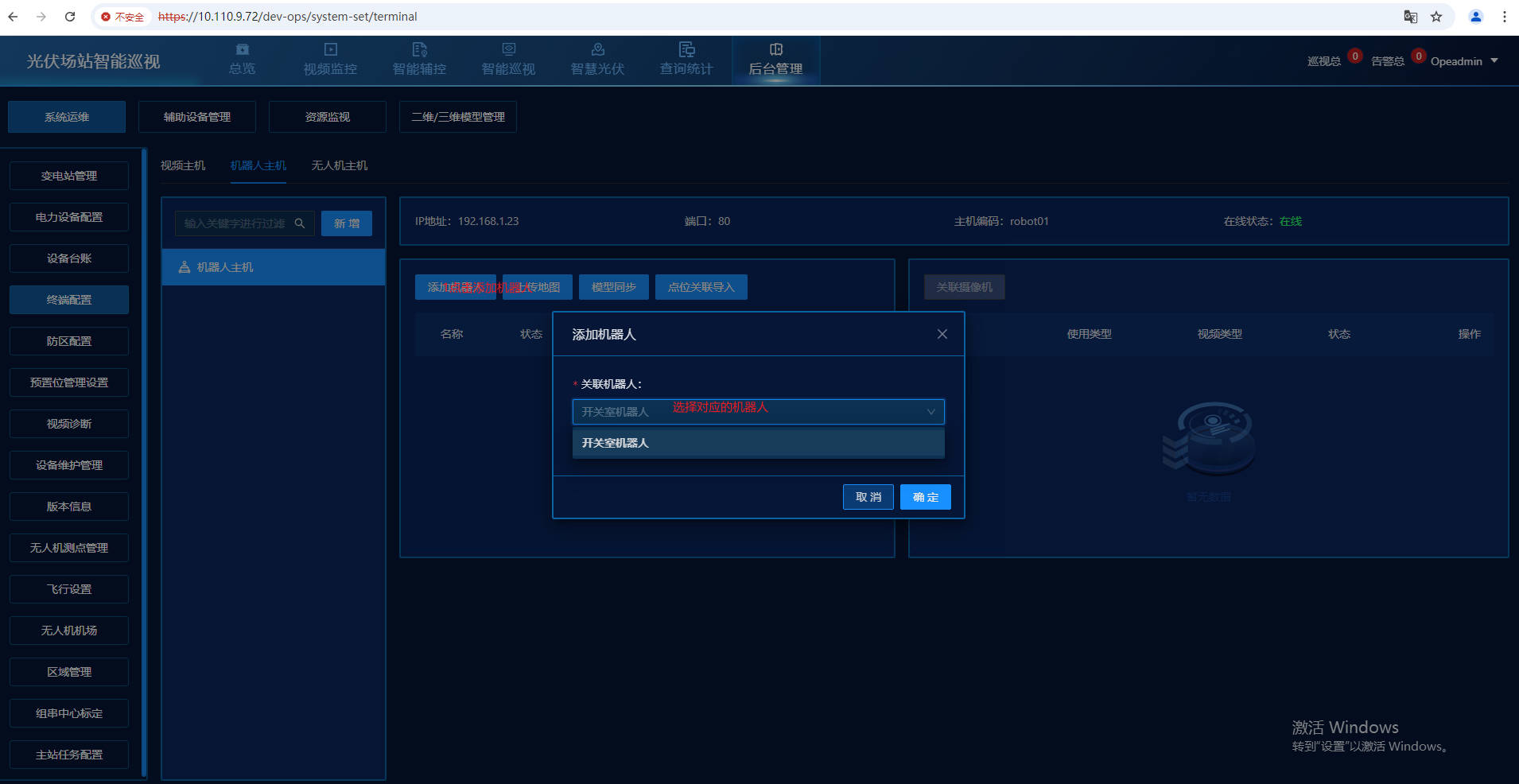
添加机器人平台
终端配置新增机器人主机
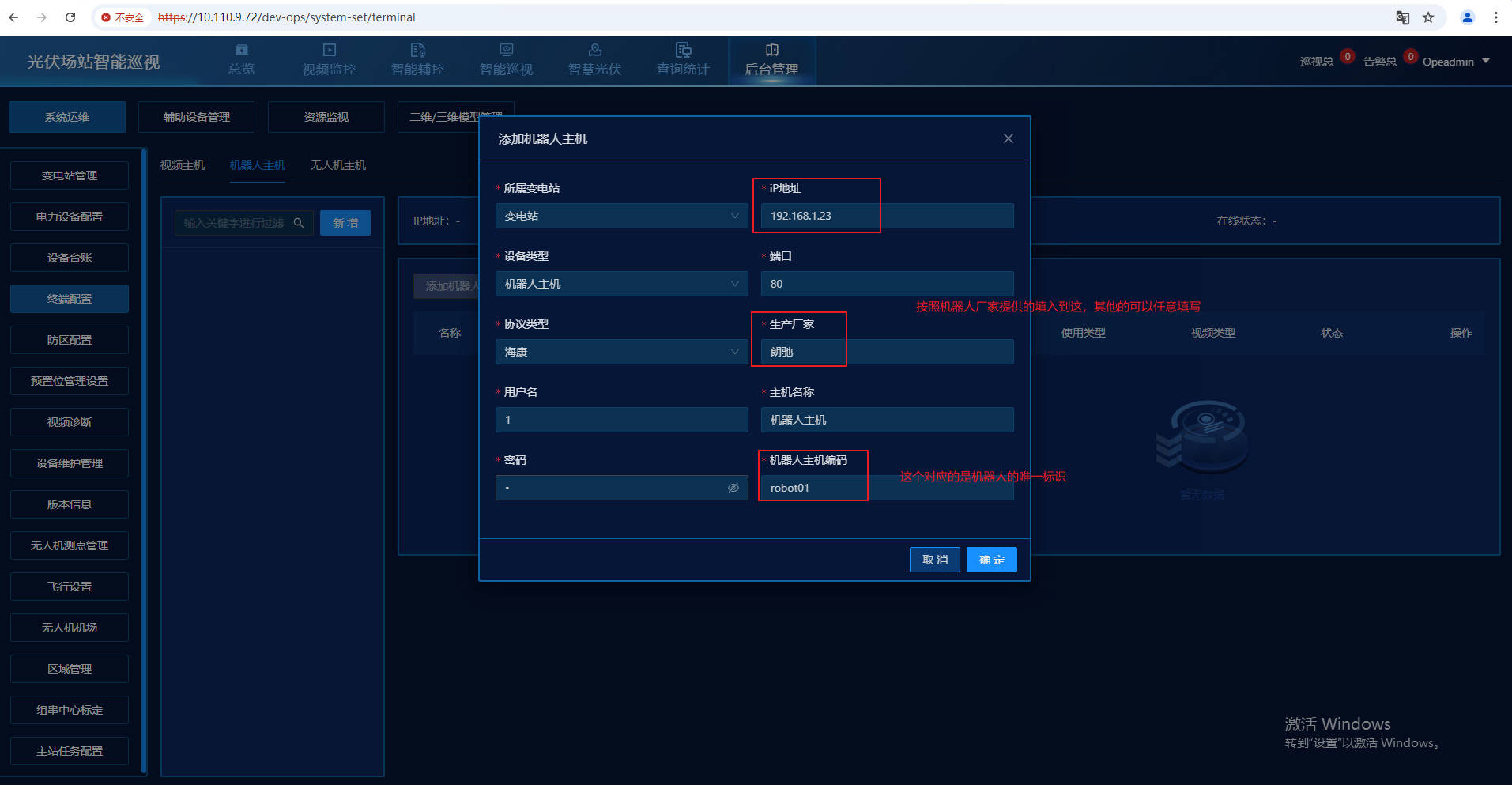
添加机器人
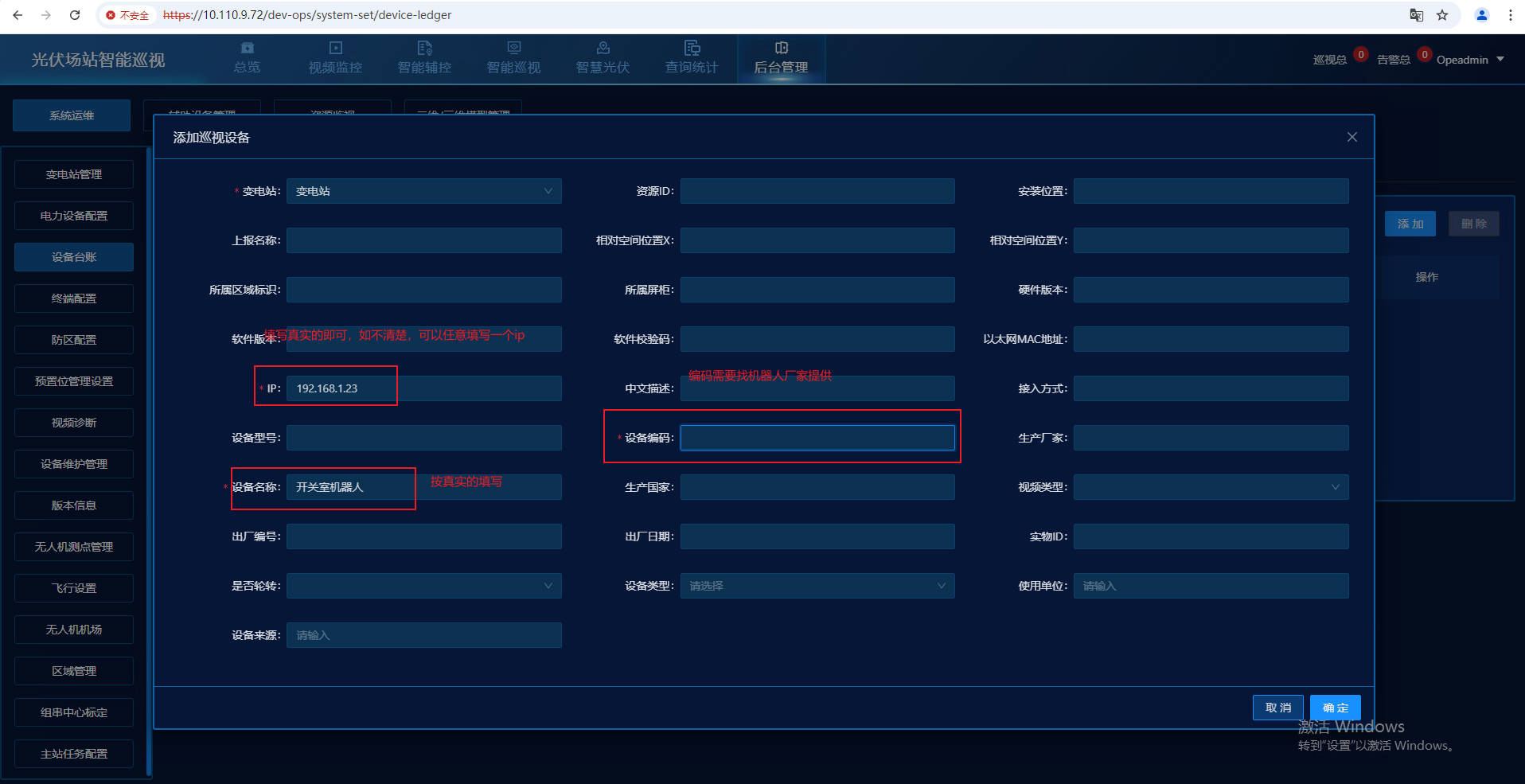
设备台账中新增机器人
添加机器人摄像头
设备台账--摄像机中新增机器人的摄像头,一个机器人对应红外和可见光,所以应该添加两个摄像头

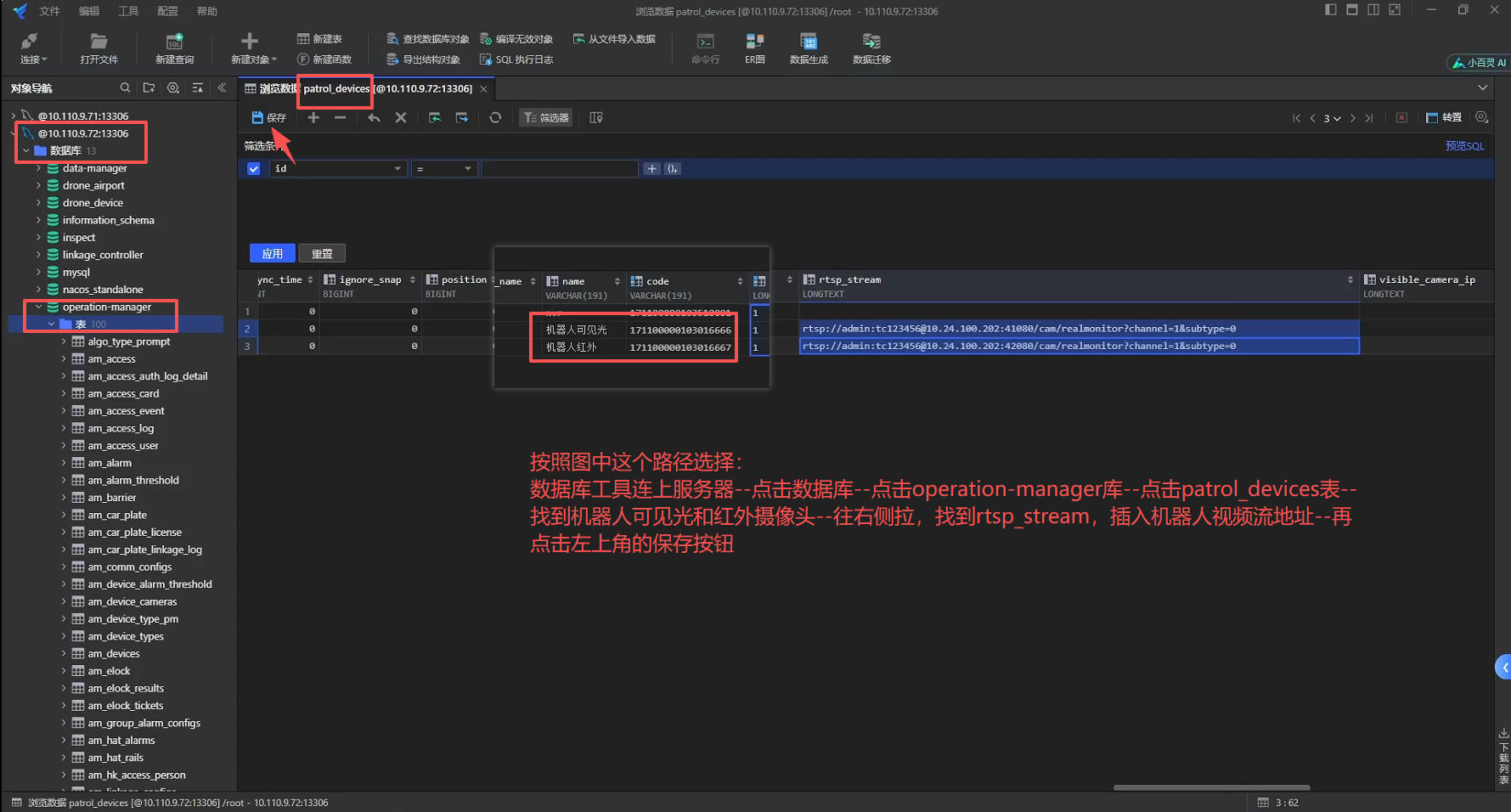
配置机器人视频流
1.联系机器人厂家要机器人可见光和红外视频流地址,如天创机器人的视频流固定地址是:
可见光rtsp://admin:tc123456@机器人ip:41080/cam/realmonitor?channel=1&subtype=0 红外rtsp://admin:tc123456@机器人ip:42080/cam/realmonitor?channel=1&subtype=0
如朗驰机器人视频流固定地址是:
可见光rtsp://admin:lc123456@机器人ip:4010/cam/realmonitor?channel=1&subtype=0 红外rtsp://机器人ip:5010/1/888888:888888/main
2.将视频流地址填入到patrol_devices表中机器人两个摄像头rtsp_stream里面
3.最后点击初始化B接口配置
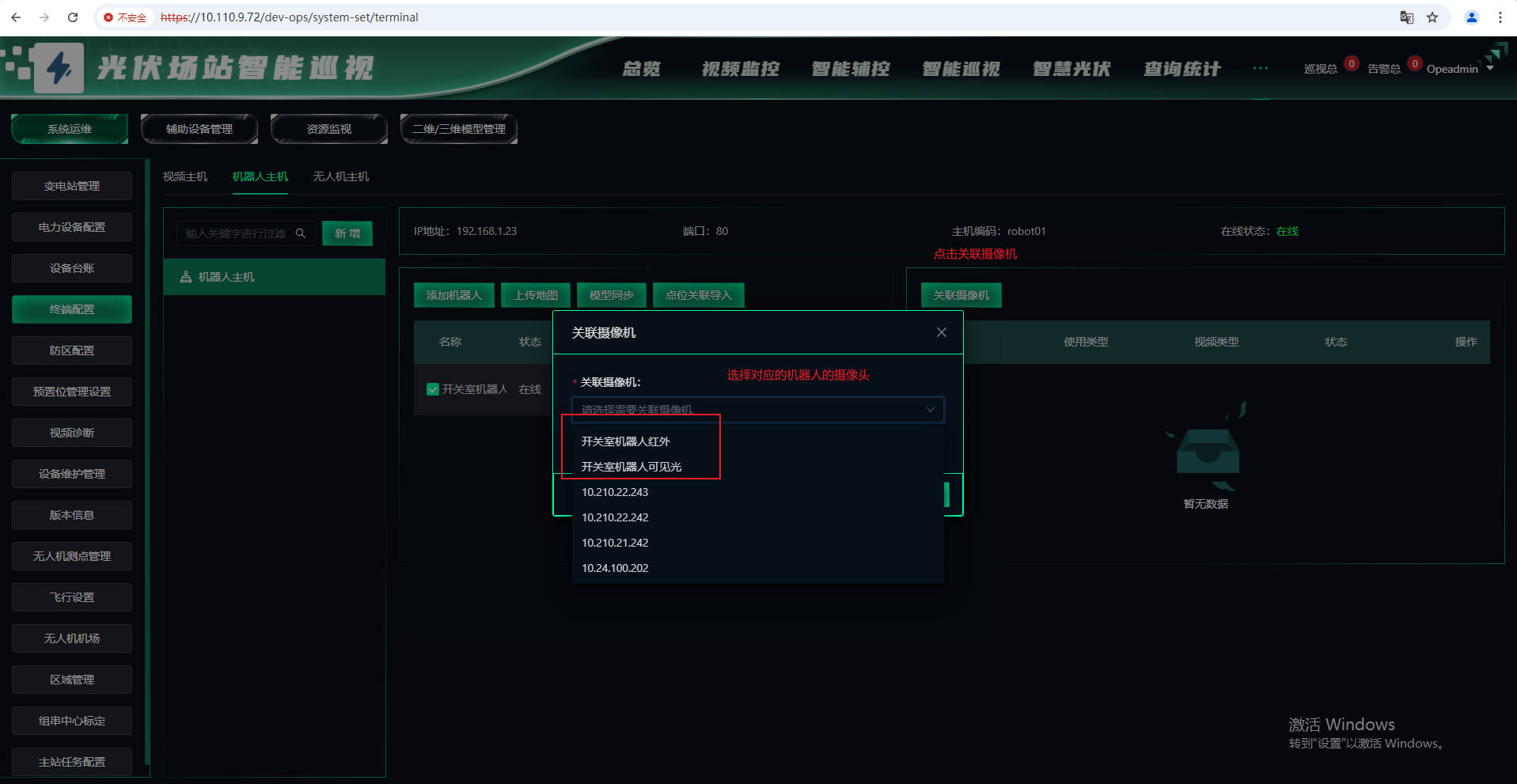
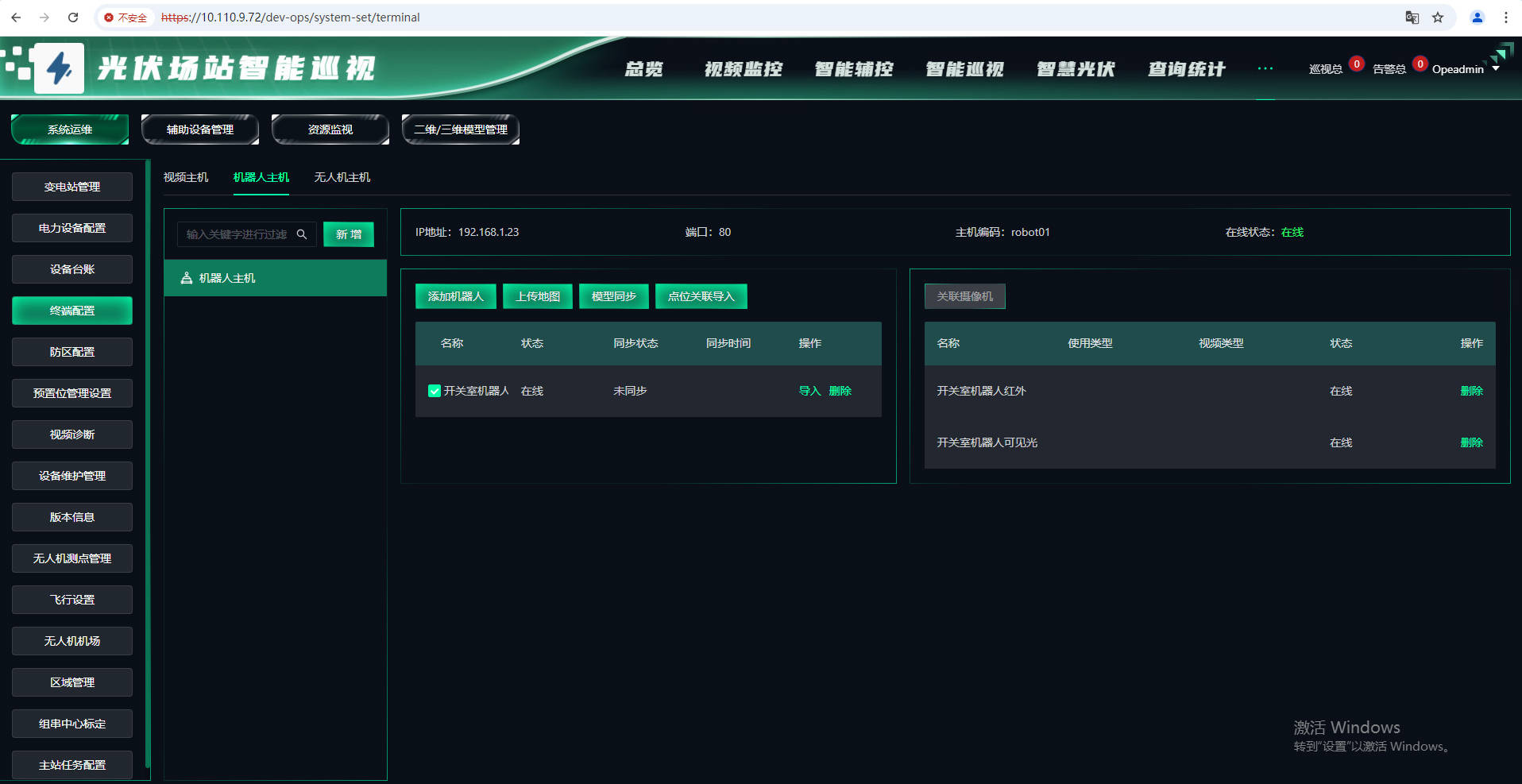
机器人关联摄像头
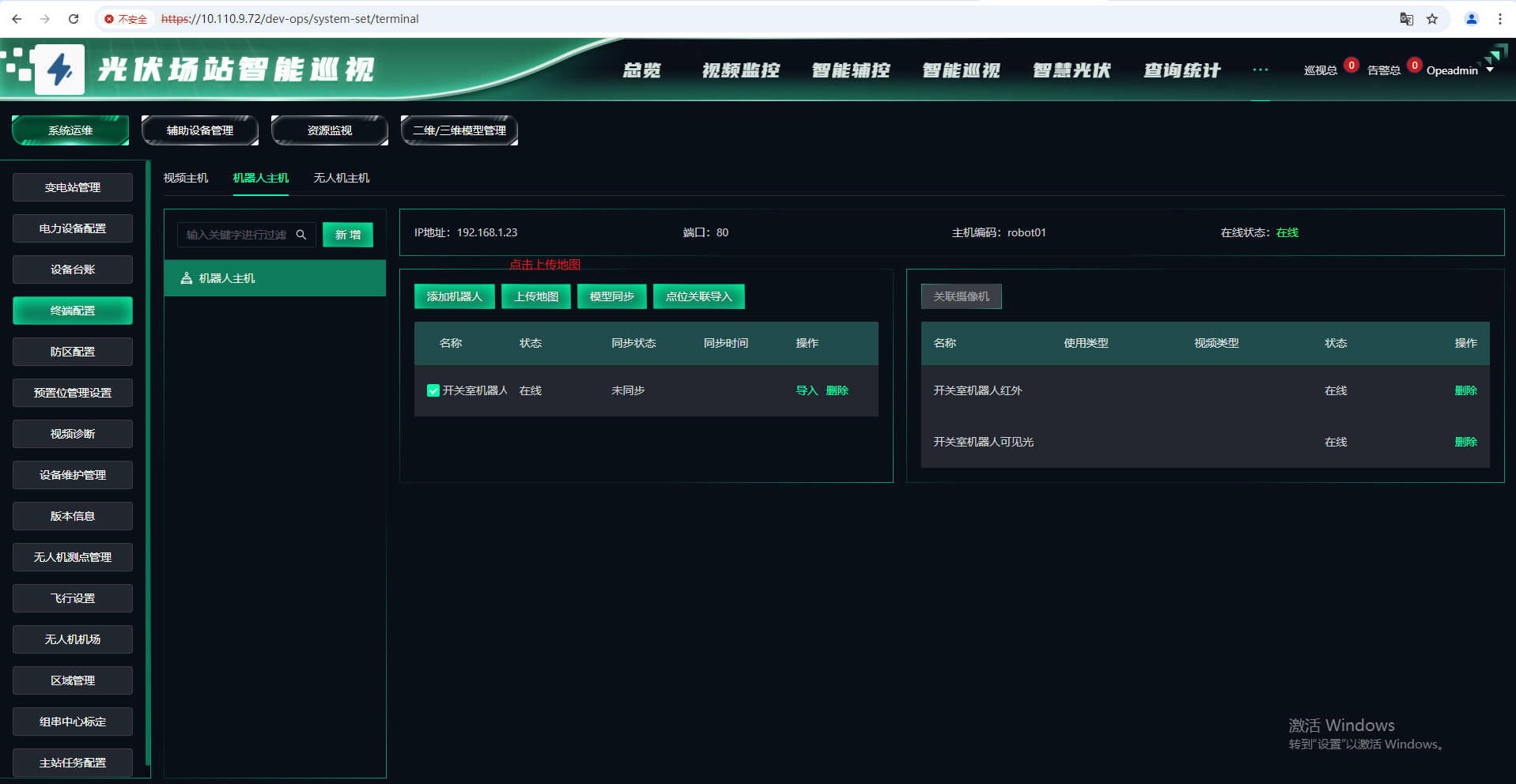
终端配置--机器人主机关联机器人和关联机器人摄像头
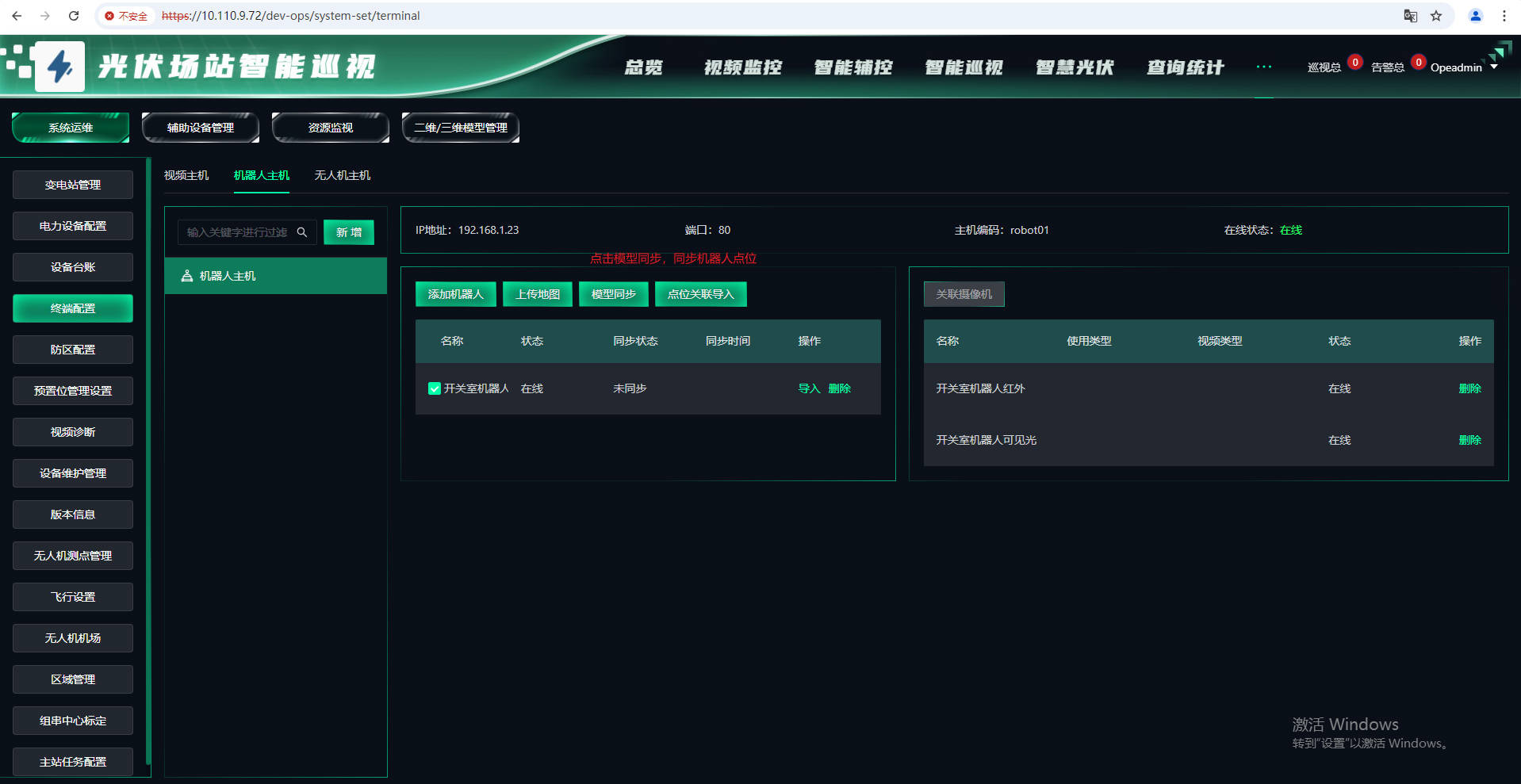
同步机器人点位
终端配置中点击模型同步
如果此处显示离线,或者点击同步报错,先核对本教程第一步和第二步,如果没问题就找机器人厂家确认是否注册上来,以及点位模型文件是否上传成功
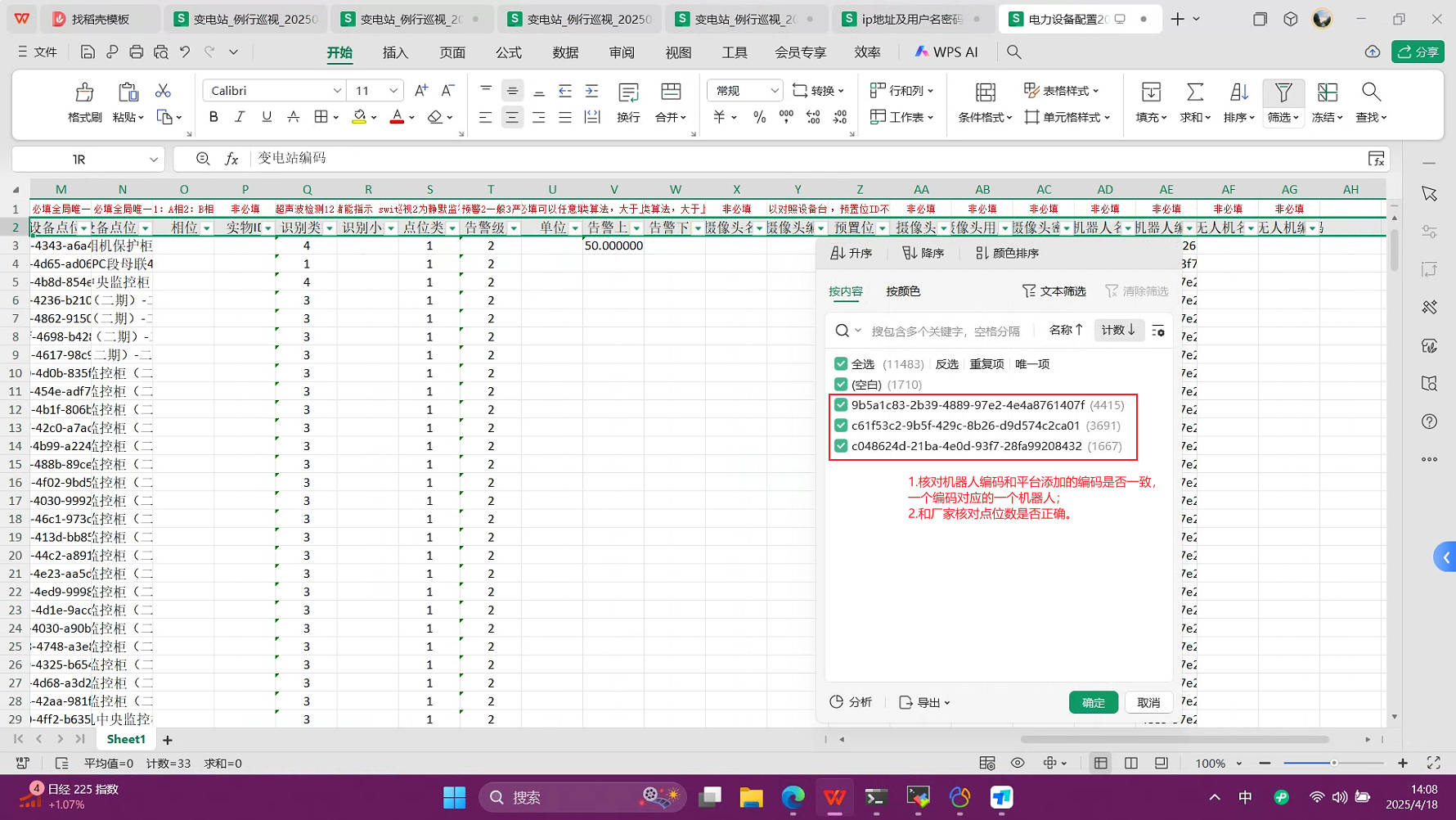
同步完成后核对机器人点位,以及平台需要退出登录才能正常显示机器人点位
如果点位数量对不上,优先找机器人厂家确认他们的模型文件中点位数量是否有问题,再重新同步点位
上传机器人地图
终端配置中点击上传地图
新建机器人巡视任务
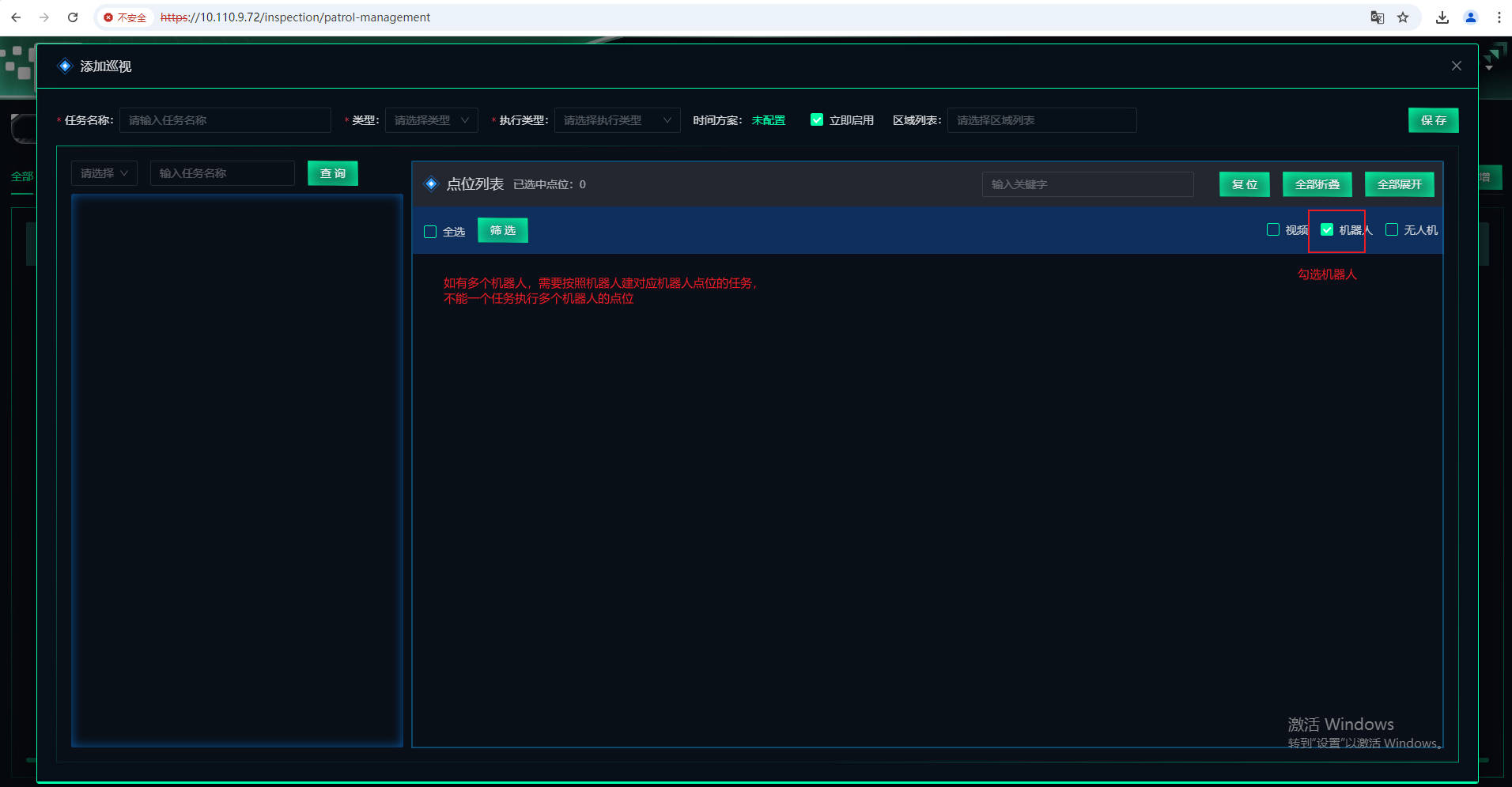
巡视管理中新增机器人巡视
注意:
- 如果点位数量过多,可能会出现下发巡视计划失败的情况,这种需要抓日志分析,也可以直接联系机器人厂家分析
- 巡视总览中机器人执行任务进度条不走,机器人也未动,需要联系机器人厂家分析